
Le applicazioni software di controllo di processo necessitano sempre di diversi componenti hardware. Queste componenti svolgono spesso funzioni che cooperano con l’applicazione principale, e non sono limitate alla sola misurazione.
Queste funzioni possono spesso essere realizzabili a scelta su diversi elementi della nostra strumentazione fornendoci strategie alternative di realizzazione, ciascuna con specifici vantaggi e svantaggi.
Valuteremo alcuni esempi frequenti per illustrare queste alternative e valutarne gli impatti sulla efficacia di esecuzione, e le implicazioni su sicurezza, ispezione, manutenzione, validazione del software in contesti di certificazione (sicurezza funzionale, validazione, etc.).
Raccomandiamo la piena consapevolezza su queste alternative di realizzazione dei sistemi di automazione, per poter sfruttarne a pieno le possibilità senza soffrirne gli svantaggi.
- Il software di automazione per i non specialisti
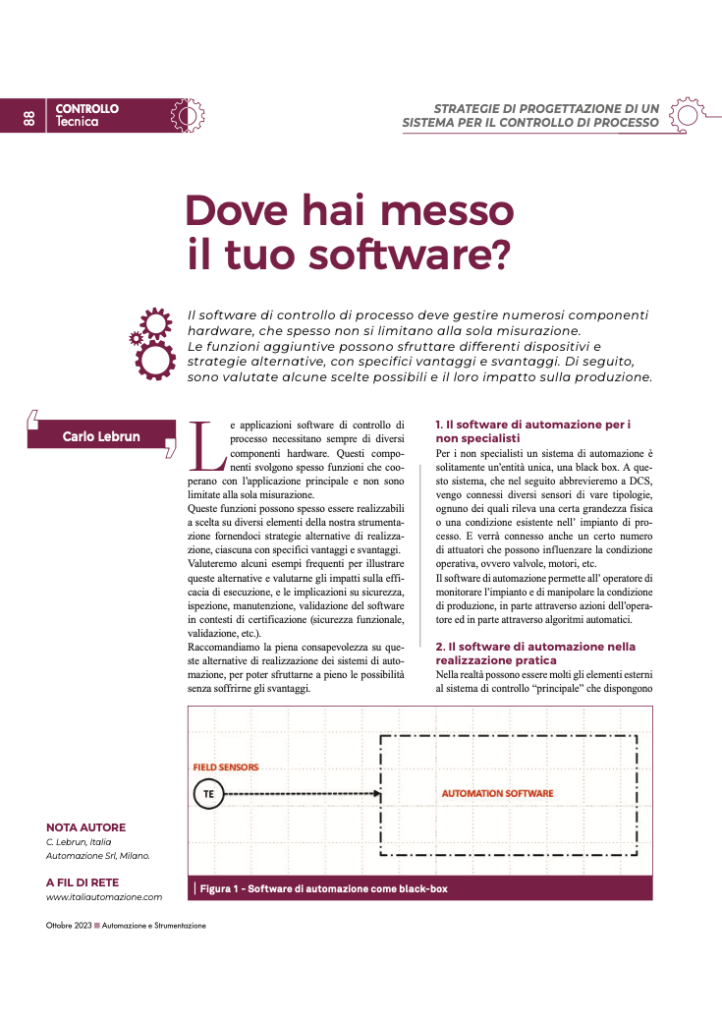
Per i non specialisti un sistema di automazione è solitamente un’entità unica, una black box. A questo sistema, che nel seguito abbrevieremo a DCS, vengo connessi diversi sensori di vare tipologie, ognuno dei quali rileva una certa grandezza fisica o una condizione esistente nell’ impianto di processo. E verrà connesso anche un certo numero di attuatori che possono influenzare la condizione operativa, ovvero valvole, motori, etc.
Il software di automazione permette all’ operatore di monitorare l’impianto, e di manipolare la condizione di produzione, in parte attraverso azioni dell’operatore ed in parte attraverso algoritmi automatici.

- Il software di automazione nella realizzazione pratica
Nella realtà possono essere molti gli elementi esterni al sistema di controllo “principale” che dispongono di software sofisticati e possono svolgere manipolazioni del segnale, regolazioni o calcoli complessi.
Molte di questi elementi sono considerati elementi di strumentazione di campo, la cui funzione è la sola misurazione, ma l’ evoluzione tecnologica, e la competizione di mercato hanno spinto l’ introduzione di funzionalità sempre nuove, fino a raggiungere la possibilità di sovrapposizione con quello che consideriamo software applicativo.
Ecco una panoramica dei più comuni:
- Trasmettitori in campo tradizionali: la loro funzione principale è convertire le variazioni fisiche che avvengono nel processo sulla grandezza misurata, per trasformarlo in segnale elettrico, spesso nel tipico 4-20mA, facilmente trasferibile a distanza. Possono includere funzioni di caratterizzazione del segnale per adattarsi a misurazioni non lineari (es radice quadrata, curva termocoppie, etc.). Spesso rendono disponibili anche altre utili funzioni accessorie legate alla misura (filtrazione del rumore, filtri passa alto/passa basso, funzioni di diagnostica che generano valori caratteristici, logiche di low-cutoff, logiche di burn-out)
- Trasmettitori in campo “multivariabili”: oltre alle funzioni già menzionate, incorporano più sensori secondari che possono essere usati come indipendenti (talvolta per risparmiare spazio), oppure possono migliorare l’accuratezza della misura principale attraverso calcoli di correzione/compensazione approssimati o analitici. Possiamo citare come esempio i sensori di pressione differenziale che misurano anche la temperatura e permettono la misura della portata volumetrica con compensazione in temperatura e pressione, i conduttivimetri dotati di correzione in temperatura, o i misuratori di portata di tipo Coriolis che misurano sia portata in massa che densità.
- Trasmettitori in campo “bus di campo”: oltre alla gestione della misura possono includere molte funzioni tipicamente caratteristiche del sistema di controllo, quali regolazioni PID, e calcoli.
- Convertitori di segnale: ne esistono di tantissimi tipi, e con tante possibili istallazioni dal campo alla sala controllo, passando per armadi intermedi e sale tecniche. Possono essere usati per la conversione elettrica di un segnale, ma anche per la modifica della sua caratterizzazione/linearizzazione, per la duplicazione di un segnale, per la valutazione di soglie di allarme attraverso generando segnali contatti aperti/chiusi (“trip amplifier”. Talvolta possono leggere più di un segnale, e permettono alcuni calcoli tra le diverse misure.
- Controllori dedicati, PLC bordo macchina associati a package/skid. Molte applicazioni ed apparecchiature richiedono controllori specializzati, come gli inverter per i motori, gli analizzatori di vibrazioni di macchine rotanti, i controllori anti-pompaggio dei compressori. Possono essere veri e propri PLC, ovvero completamente programmabili, oppure dispositivi hardware con firmware non modificabile, ma che possono realizzare azioni di controllo continuo o discreto sulla base della definizione di svariati parametri (un “semplice” inverter può contenere migliaia di parametri configurabili). Questi controllori sono spesso necessari per l’alta specializzazione funzionale, ma anche per la conformità con requisiti particolari (come la velocità di esecuzione superiore a quella di un normale DCS). Anche questi, oltre alla loro funzione specifica, possono includere calcoli o logiche accessorie, gestione di allarmi di processo e diagnostica.
- Schede di I/O DCS. Alcuni modelli di schede I/O hanno la possibilità di eseguire alcune semplici logiche o piccoli programmi applicativi, senza utilizzare i moduli di calcolo e regolazione dello stesso sistema (CPU). Quando questo è possibile si ha solitamente a disposizione una velocità di scansione della regolazione molto più veloce di quello delle CPU. Si possono così realizzare ad esempio piccole logiche ad alta velocità come, ad esempio, il blocco di una turbina in seguito all’ alta velocità di rotazione.
Iniziamo ad approfondire l’argomento attraverso alcun i esempi frequenti.
- Esempio 1 –misure di portata basate su pressione differenziale
Le misure di portata basate su pressione differenziale richiedono l’applicazione di una trasformazione non lineare della misura, basata sulla radice quadrata. In questo articolo non approfondiamo il dettaglio del calcolo.
Abbiamo frequentemente a disposizione le seguenti alternative:
- Calcolare la radice quadrata a livello di trasmettitore in campo. Il segnale 4-20mA dal trasmettitore al sistema di controllo sarà perciò un segnale linearmente proporzionale alla portata volumetrica.
- Trasmettere un segnale lineare 4-20 mA da campo a sistema, ed effettuare il calcolo a segnale quadratico nel sistema di controllo.
Il risultato finale come visualizzazione per l’operatore dovrebbe risultare equivalente, a meno di errori (capita sovente di “dimenticare” la radice quadrata, o viceversa di calcolarla in entrambi i dispositivi, e quindi due volte).
Per fare una scelta possiamo quindi fare le seguenti considerazioni:
- E’ raccomandabile in generale effettuare una scelta generale applicabile a tutto il sito produttivo. Scelte disomogenee aumentano la complessità per progettisti e manutentori.
- Un segnale 4-20mA lineare semplifica collaudi e troubleshooting.
- Un segnale 4-20 mA quadratico semplifica la calibrazione del trasmettitore (che sarà lineare). Questo è un fattore importante se sono prevedibili frequenti ricalibrazioni e sostituzioni, magari anche la notte o in reperibilità.
- Effettuare calcoli nei trasmettitori alleggerisce il sistema di controllo. Si potrebbe addirittura sfruttare la cosa usando strumenti moderni ed avanzati, per non appesantire un sistema di controllo datato.
- Esempio 2 – misure di temperatura da termocoppie/termoresistenze
Le misure da termocoppie o termoresistenze possono in generale essere acquisite secondo le seguenti modalità alternative:
- Connessione diretta da campo a sistema di controllo, usando moduli di acquisizione I/O dedicati a questo tipo di segnali. Queste schede effettuano anche la linearizzazione del segnale, e la compensazione della lettura con la temperatura ambiente (“giunto freddo”). Approccio facile e funzionale, ma generalmente più costoso dei successivi. Un vantaggio è che in caso di sostituzione di sensore o di modulo I/O, il software applicativo è completamente incluso nel sistema di controllo.
- Connessione ad un trasmettitore locale, che trasmette il segnale 4-20 mA a sistema di controllo. In questo caso è il trasmettitore che effettua la linearizzazione e taglia la lettura alla scala desiderata (solitamente il campo operativo è più ristretto rispetto al campo “nativo” del sensore. In caso di manutenzione occorre ricalibrare il trasmettitore ad hoc per il sensore considerato (es tipo di termocoppia, scala, etc.). Se la misura è implicata in funzioni di sicurezza si possono utilizzare utili funzioni di autodiagnostica del trasmettitore, come ad esempio la configurazione di “burn-out” (in caso di malfunzionamento l’uscita produce un valore altissimo, o bassissimo, che forza eventuale logiche di sistema verso la condizione di sicurezza, “fail-safe”). Vedi figura 2, in alto.
- Connessione ad un trasmettitore installato negli armadi della sala tecnica. E’ solitamente la soluzione più economica perché la custodia istallabile dentro un armadio non richiede particolari attenzioni ATEX o IP. . In caso di manutenzione occorre ricalibrare il trasmettitore ad hoc per il sensore considerato (es tipo di termocoppia, scala, etc.). La configurazione richiede solitamente software dedicato per PC, e cavo di comunicazione proprietario. Vedi figura 2, in basso.

Esempio 3 – Controllo motore con inverter
Talvolta la “delocalizzazione” del soft6ware può derivare dalla suddivisione dello scopo del lavoro tra fornitori diversi. È una pratica scontata usare un modulo inverter per controllare un motore a velocità variabile. L’ inverter può solitamente svolgere anche alcuni compiti accessori, quali ad esempio azionare il blocco del motore in caso di alta temperatura degli avvolgimenti. Ma possono essere necessarie ulteriori protezioni, oltre la capacità di acquisizione segnali previste dall’ inverter stesso. Se si richiede la realizzazione di queste logiche aggiuntive allo stesso fornitore dell’inverter, ne può derivare un quadro che contiene anche ulteriori elementi di fornitori terzi.
Niente di male se il risultato è un unico pannello che integra tutte le funzioni relative al nostro motore. Ma attenzione anche a prevedere adeguata documentazione e tutti gli strumenti hardware/software che possano essere necessari per la manutenzione. Un esempio abbastanza semplice è riportato in figura 3.

Conclusioni
Per concludere riassumiamo di seguito gli aspetti da valutare durante la progettazione di un sistema:
- Capacità di calcolo del DCS:
Utilizzare dispositivi esterni può alleggerire in parte il carico dei processori del DCS. Per alcune applicazioni permette una esecuzione a velocità di scansione maggiore di quella del DCS.
- Documentazione
I moderni DCS prevedono agevoli funzioni di documentazione. Occorre prestare però attenzione a tutte i componenti dell’applicazione che sono state spostate al di fuori del sistema DCS, e prevedere adeguata documentazione attraverso, schemi logici, schemi elettrici degli anelli di regolazione completi (Loop Wiring Diagram), schemi riassuntivi generali delle connessioni (General Wiring Diagram).
Attenzione particolare ad aspetti che sono a tutti gli effetti software applicativo e riguardano la eventuale validazione del software (azioni logiche, rampe di variazione della velocità di un motore, etc.)
- Manutenzione – calibrazione o sostituzione
È importante prevedere tutti gli strumenti necessari per calibrazione e riconfigurazione di tutti i dispositivi coinvolti. Anche nel caso si utilizzino i servizi dei fornitori per la manutenzione è raccomandabile avere a disposizione gli strumenti necessari, per evitare perdite di tempo dovute a dimenticanze o incompatibilità di versioni. Talvolta componenti acquistati dallo stesso fornitore richiedono strumenti di configurazione diversi.
Prevedere inoltre adeguata documentazione per la calibrazione, per evitare che la manutenzione debba effettuare ricerche complesse con documentazione di ingegneria distribuita su documenti diversi.
- Aumento della probabilità di guasto
Ogni elemento aggiunto ad un anello di regolazione aumenta la probabilità di guasto del loop stesso. Nella progettazione è importante valutare gli effetti dei guasti per mitigare gli effetti e garantire le condizioni di sicurezza. Questa valutazione è critica per sistemi con certificazioni di sicurezza funzionale.
- Rispetto della ridondanza
Ogni elemento aggiunto ad un anello di regolazione fare attenzione a garantire il livello di ridondanza desiderato. Questa valutazione è critica per sistemi con certificazioni di sicurezza funzionale.
- Necessita di ricambi
Per ogni elemento aggiunto ad un anello di regolazione si dovrebbe prevedere la presenza di ricambi. I ricambi devono essere o identici o comunque compatibili. Se si usano ad esempio diversi trasmettitori come ricambi per un certo servizio, verificare che siano disponibili le stesse funzionalità.
- Necessita di collaudi / controlli periodi “proof test”
Per i collaudi valgono considerazioni simili a quelle per la manutenzione. Occorre prestare attenzione alla verifica di tutti gli elementi della catena di misura o regolazione, e verificarne anche la condizione di guasto. Questa valutazione è critica per sistemi con certificazioni di sicurezza funzionale. Le procedure di “proof test” dovranno essere disponibili per tutti i componenti.
- Sicurezza informatica
Ogni sistema di controllo deve sottostare oggi a criteri molto esigenti di sicurezza informatica “cybersecurity”. Se si utilizzano sottosistemi programmabili e connessi in rete occorre utilizzare criteri equivalenti a quelli del sistema principale, oppure interporre dei firewall per segregare le diverse aree di rete. I dispositivi non-programmabili non richiedono queste protezioni, ma è comunque opportuno limitarne l’accesso del personale ai soli addetti, attraverso armadi o sale tecniche chiusi a chiave.
- Smantellamento / de-commissioning
La corretta documentazione sarà utile anche alla fine del ciclo di vita dell’apparecchiatura. In mancanza di questa lo smantellamento di un’apparecchiatura viene effettuato trascurando alcuni componenti, che rischiano di rimanere quindi sul posto per non avendo più nessuna utilità, occupando spazio prezioso e complicando la progettazione di nuovi progetti, provocando dubbi ed incertezze sulle conseguenze della rimozione.
